資訊中心
這里有最新鮮的政策動態、行業資訊,也與你分享我們的點滴進步




這里有最新鮮的政策動態、行業資訊,也與你分享我們的點滴進步
互聯網 2023-03-21 00:00:00




前言:本文引入數字孿生技術,構建柔性制造系統的數字孿生模型。利用該數字孿生模型對建設前的方案進行虛擬仿真和調試,驗證其合理性。并通過反復調整和迭代優化建設前的方案,可很大程度上縮短柔性制造系統設計、建設和投產的時間。利用數字孿生還可以在柔性制造系統建設運行時對實體設備進行實時監控,了解各設備的運行狀態。
1 基于數字孿生的柔性制造系統總體架構設計
1.1 系統功能
柔性制造系統數字孿生模型可實現以下功能。
(1) 評估柔性制造系統的性能
柔性制造的數字孿生系統應該對工件的到位信號、工件的合格率信號、工件的材質顏色等信號、氣缸的到位信號、限位信號等信號進行實時監控,對超范圍的參數進行提醒和報警。并通過系統的穩定度、系統的精確率和產品的合格率等,對生產系統的性能情況進行評估。
(2) 制定并優化柔性制造系統的運行策略
數字孿生體與物理實體之間的雙向作用,可為柔性制造系統運行策略制定提供有效的信息支持。即將物理實體的參與設備、運行約束條件、動作時序等信息作用于系統數字孿生體,并在數字孿生體上進行調試運行,通過不斷迭代優化制定柔性制造系統的最佳運行策略。
(3) 模擬故障狀態與快速推演故障預案
數字孿生體可用于模擬故障狀態,即通過改變數字孿生體的運行時序或參數。在數字孿生體的模擬故障狀態下,可快速仿真模擬已經制定好的故障預案,判斷故障預案的有效性和可行性。
1.2 總體架構
柔性制造系統的數字孿生模型總體架構如圖1所示,包括:數字孿生層、服務應用層及物理層。
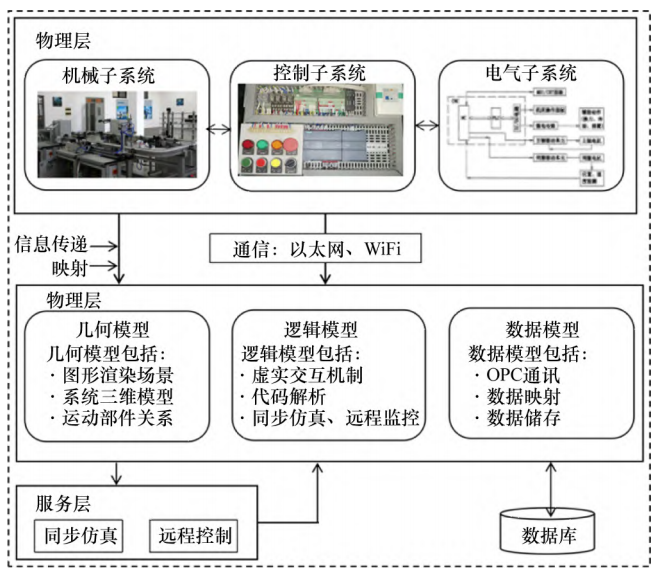
圖1 總體架構
物理層主要由電氣子系統、控制子系統和機械子系統 3 大部分組成。機械子系統由加工單元 (鉆床、銑 床)、立體倉庫 (原料庫、成品庫、廢品庫)、龍門吊、視覺比對單元、熱處理單元和裝配加工單元等組成。還包括每個單元及整體的動作過程。電氣子系統利用傳感器采集工業現場信息,并保存到控制子系統的存儲器中,控制子系統執行程序,進而驅動機械子系統按約束條件運行。
數字孿生模型包括數據模型、邏輯模型和幾何模型。數據模型主要是將物理模型中的傳感器信號、狀態信號等映射到數字孿生模型中。邏輯模型用于映射物理層的實際運動過程,轉化為數字孿生層的運動行為。幾何模型,保證數字孿生模型與實際柔性制造系統在顏色、材質屬性、形狀、尺寸大小等方面具有高相似度。
服務層主要由遠程控制和同步仿真兩部分組成。同步仿真可以對物理系統的運行狀態實時監控,作為性能評估的參考。遠程控制則是通過數字孿生系統發送信號控制實際系統,實現反向控制,用于異常處理。物理層和數據孿生層是通過 WiFi 或以太網通行完成信息交互,并利用數據庫存儲或讀取數據。
2 柔性制造數字孿生關鍵技術
2.1 數據感知和傳輸
近年來,隨著傳感器性能的逐漸提升,新型的傳感器具有耐腐蝕、抗高溫、采樣頻率高、采集數據大量增加等特點,柔性制造系統利用這些傳感器將大量的相關數據提供給數字孿生體。因此,傳感器的性能決定了數字孿生體的最終效果,這些新型的傳感器為數字孿生提供保障。
傳感器采集的信號主要有兩種,一是開關量信號,二是模擬量信號。可通過可編程邏輯控制器 (PLC) 系 統、分布式控制 (DCS) 系統等進行采集這些傳感器信號。而這兩種信號的采樣周期不一樣,通常模擬量信號的采樣周期為分鐘級、開關量信號的采樣周期為秒級甚至毫秒級。因此,為了解決這些問題學者們采用了各種方法。如對概率主元分 (PPCA) 等概率框架下的統計學習方法進行集成,對二采樣率數據使用因子分析(FA)。對多采樣率數據利用多個卡爾曼濾波器進行信息融合等。以及對完成自動化的數據利用 TOSCA將分析算法與數據集成相互關聯起來。將圖像、文本轉換為向量表達形式的結構化數據,從而進行建模的方法也可作為借鑒應用于工業中。
物理實體與孿生模型間數據的傳輸是通過第五代移動通信網絡 (5G) 進行傳輸的。5G 因其大帶寬、低延時、低功耗等特點,是實現數字孿生的必要技術。
2.2 模型構建
柔性制造的數字孿生系統需真實、全面、綜合的反映物理系統。本文對孿生模型的構建主要從邏輯模型、數據模型和幾何模型3個方面進行了詳細介紹。
(1) 通過建立幾何模型,保證數字孿生模型與實際柔性制造系統在顏色、材質屬性、形狀、尺寸大小等方面具有高相似度。本文采用 SolidWorks 軟件進行三維建模。SolidWorks 軟件包括零件建模、模具設計、裝配設計和運動仿真等,是非常優秀的三維設計軟件。功能強大、易學易用、技術創新是 SolidWorks軟件的 3大特點。在建模時需要對三維模型進行簡化處理,保留主要部件如運動軸、工件、電機、熱處理裝置等,簡化與仿真無關的部件。為詳細描述柔性制造系統屬性參數,建模時將屬性參數綁定到三維模型上。柔性制造系統的每個單元都可以看做多個部件通過某種約束條件有機的聯系在一起,構成一個具有某種邏輯關系的運動系統。
(2) 邏輯模型主要是用來建立與實體模型一致的動態加工過程,構建虛擬柔性制造系統。邏輯模型還要實現數字孿生模型的同步仿真和遠程控制。為了使虛擬系統能準確模擬運行過程,需要將實體模型的各類代碼,如梯形圖等進行識別與解析,代碼解析如圖2所示。

圖2 代碼解析
(3) 數據模型主要是將物理模型中的傳感器信號、狀態信號等映射到數字孿生模型中。由于本文利用 PLC控制柔性制造系統,所以通過 PLC 采集傳感器信號并暫存到輸入映像寄存器和數據寄存器中,接著利用 OPC通信建立與上位機OCTOPUZ的連接。OPC是目前使用比較廣泛的基于標準的數據通信方法,它提取了數據發送設備 (如 PLC),和數據接收設備 (如 HMI) 的執行細節,因此不需要了解彼此的本地通信協議和內部數據組織形式就可以進行數據交換。
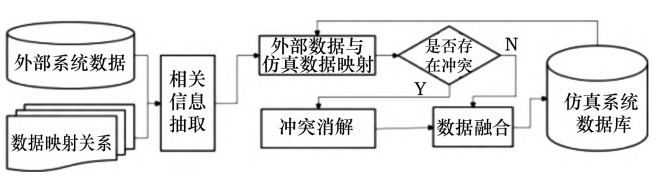
圖3 數據接入流程
數據接入流程如圖 3 所示,首先確定從實體設備獲得的數據信息,并確定數據映射關系。其次將數據映射關系和外部系統數據進行比較,確定從外部系統需要抽取的相關信息。然后將仿真數據和外部數據進行映射,匹配為對。若兩者數據存在沖突,則消解沖突在虛擬系統中增加或刪除相應的數據信號。若兩者數據不存在沖突,則進行數據融合。
3 應用案例
本文以亞龍公司的 YL-268 柔性制造生產線為例,該生產線由立體倉庫、加工單元、輸送單元、視覺比對單元、熱處理單元、裝配加工單元等組成。其工藝流程為:從立體倉庫的原料庫中取出工件,搬至輸送皮帶上并運送至加工單元,加工完成后運送至視覺比對單元,比對不合格的工件直接運送至廢品庫,比對合格的工件運送至熱處理單元進行加熱和冷卻處理,處理完成后運送至裝配單元進行裝配,裝配完成后運送至成品庫。明確了柔性制造系統的組成和工作流程后,再明確柔性制造系統各個單元機理模型、可獲取的數據、新增轉化數據等。最后制定該柔性制造系統數字孿生體的需求分析和實現策略。
3.1 柔性制造生產線數字建模
根據現有測量方法,完成對柔性制造系統實體對象的空間運動、幾何結構、幾何關聯等幾何屬性的獲取。利用 SolidWorks 實現柔性制造系統幾何模型的構建。并對各設備空間幾何模型進行匹配連接,實現幾何模型數字化精準復刻。在 OCTOPUZ 中導入已建立好的幾何模型。PLC 采集現場信息并保存在寄存器中,并與上位機 OCTOPUZ 進行 OPC 通信,實現對柔性制造系統外部信號的提取和映射,從而實現系統的控制和信息的采集。并使用 Python 語言在 OCTOPUZ 平臺上開發包含模塊功能和人機交互界面的系統程序進行驗證。
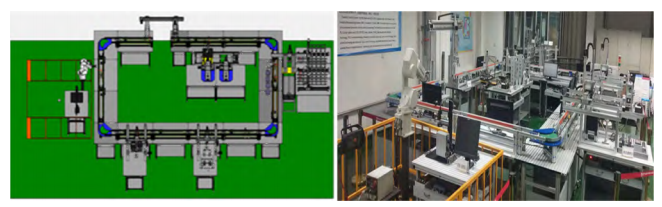
圖4 柔性制造系統的數字孿生建模效果
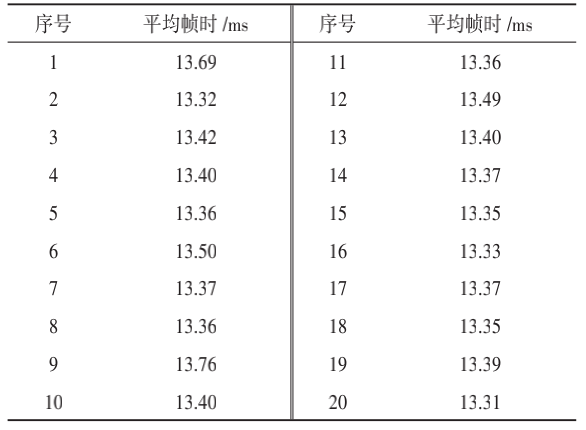
柔性制造系統的數字孿生建模效果如圖 4 所示,為了得到良好的可視化效果,選擇不同的幀時,將同一段代碼執行 20次運動仿真,從表 1可知模型運動效果在13 ms左右時最好。并與物理實體設備相比較可知,柔性制造系統數字孿生模型在形狀、模型的精細度等方面具有高保證度。
表1 運行仿真幀時
3.2 模型測試驗證
本文從模型的相對位置、數據采集量、模型響應延遲等方面來驗證柔性制造控制系統數字孿生模型的性能。通過對數字孿生模型測量可知,每個部件都是1∶1還原實體模型部件,且每個單元部件的連接以及單元之間的連接完全與實體模型一致,滿足實體模型的相對位置關系。實體設備與數字孿生模型采集到的信號,如軸的原點檢測信號、軸的極限信號、氣缸的極限信號等達到完全同步。且系統運行時,實際觀測到的仿真運動無明顯延遲。因此將數字孿生模型與生產系統相關聯,實現同步運行、實時監控,可實現產品在設計、制造過程中的虛擬仿真,以提高產品的質量、生產效率和產品質量穩定性。
柔性制造系統的數字孿生模型可以為系統優化提供依據。一方面對數字孿生模型監測到的生產異常進行診斷,并按“問題分析——模型構建——算法設計——優化分析”的流程進行系統優化。另一方面利用聚類分析、關聯分析、優化算法等方法,參考大數據的研究思路,對過程相關的數據進行分析,實現對生成過程的優化。
4 結束語
將新一代信息技術應用到先進制造的關鍵業務領域,有效提升企業綜合競爭力是必然趨勢。數字孿生將被模擬對象和仿真模型融合起來,在虛擬空間再現真實生產制造場景,在柔性制造系統全生命周期數字化管理中發揮了重要作用。本文基于數字孿生技術,按1∶1的比例構建了柔性制造系統的數字模型,使實體設備和數字模型的功能相同。并利用該數字模型在柔性制造系統建設前進行虛擬調試,迭代優化并最終獲得最佳建設方案。在柔性制造系統的運行過程中實時監控實體設備,實時了解各設備的運行狀態。
來源:新工業網